6.4. Systems of Linear Equations¶
Systems of linear equations are everywhere in the systems that engineers design. Many (probably most) systems are linear. Differential equations sometimes describe systems, but we can change differential equations to linear equations by applying the Laplace transform. The main point, though, is that in actual design and analysis applications, we have systems of equations with multiple unknown variables, not just one equation. We will consider some application examples of systems of linear equations in Linear System Applications. Initially, however, we will focus on how to solve them.
The variables in linear equations are only multiplied by numbers. We do not have products of variables such as \(xy\) or \(x^2\). We also do not have exponentials such as \(e^x\) or functions of variables.
6.4.1. An Example¶
The following system of equations has three unknown variables.
The first step is to represent the equations as a matrix equation.
The common notation for describing this equation is \(\mathbf{A}\,\bm{x} = \bm{b}\), where the vector \(\bm{x}\) represents the unknowns. In linear algebra notation, we describe the solution to the problem in terms of the inverse of the \(\bf{A}\) matrix, which is discussed in Calculating a Matrix Inverse, and
Elimination to Find the Matrix Inverse. Note that we have to be careful about the order of the terms because matrix multiplication is not commutative.
We can find the solution this way with the inv function, but MATLAB
provides a more efficient way to solve it.
6.4.2. Jumping Ahead to MATLAB¶
The left-divide operator (\) solves systems of linear equations more
efficiently than multiplying by the inverse of a matrix.
>> A = [2 -3 0; 4 -5 1; 2 -1 -3];
>> b = [3 9 -1]';
>> x = A\b
x =
3.0000
1.0000
2.0000
Thus, the values of the three unknown variables are: \(x_1 = 3\), \(x_2 = 1\), and \(x_3 = 2\).
MATLAB’s left-divide operator is a complete solution to any linear system of
equations. We will briefly discuss in Left-Divide Operator how the left-divide
operator (also known as the mldivide function) evaluates the form of the
\(\bf{A}\) matrix to determine which algorithms to use to solve the
matrix equation. Even though MATLAB gave us a powerful and versatile
function for solving systems of linear equations, we still want to
understand the algorithms it uses and in what situations each is
appropriate. Engineers need to understand MATLAB’s results to make correct
conclusions, and for cases where MATLAB or similar software is not
available. Learning how to solve linear systems will also teach us about
data analysis and other applications of linear algebra beyond systems of
equations.
6.4.3. When Does a Solution Exist?¶
Not every matrix equation of the form \(\mathbf{A}\,\bm{x} = \bm{b}\) has a unique solution. The possible solution scenarios to matrix equations with \(m\) rows and \(n\) columns (\(m{\times}n\)) of the form \(\mathbf{A}\,\bm{x} = \bm{b}\) are described below.
There may be an exact, unique solution, which occurs with both critically-determined (square) and over-determined systems of equations. A few tests can help determine if a unique solution exists.
A solution may not exist, which can occur with any system of equations, but is usually associated with square, singular systems of equations.
The solution may be an approximated rather than an exact solution, which occurs with over-determined systems of equations.
The solution may be an infinite set of vectors, which occurs with under-determined systems of equations.
A square matrix system has a unique solution when the following five conditions hold for the matrix \(\bf{A}\). If one of the conditions holds, they all hold. If any condition is false, then all conditions are false and the matrix \(\bf{A}\) is singular and no solution to \(\mathbf{A}\,\bm{x} = \bm{b}\) exists [WATKINS10].
\(\mathbf{A}^{-1}\) exists.
There is no nonzero \(\bm{x}\) such that \(\mathbf{A}\,\bm{x} = \bm{0}\).
The \(\bf{A}\) matrix is full rank, \(\text{rank}(\mathbf{A}) = m = n\). The columns and rows of \(\bf{A}\) are linearly independent.
\(\det(\mathbf{A}) \neq 0\). The determinant is a well-known test for \(\bf{A}\) being invertible (not singular), but it is slow for larger matrices. The previous rank test is sufficient.
For any given vector \(\bm{b}\), there is exactly one vector \(\bm{x}\) such that \(\mathbf{A}\,\bm{x} = \bm{b}\).
The next example does not have a solution because the third row of
\(\bf{A}\) is a linear combination of rows 1 and 2
(4*A(2,:) + A(1,:)).
>> A = [1 2 3; 0 3 1; 1 14 7];
>> % A is not full rank
>> rank(A)
ans =
2
>> % Not invertible
>> det(A)
ans =
0
>> b = [1; 2; 3];
>> % This won't go well
>> A \ b
Warning: Matrix is singular
to working precision.
ans =
NaN
-Inf
Inf
The next example has a better result.
>> A = [5 6 -1; 6 3 2; -2 -3 6];
>> b = [8 0 8]';
>> rank(A) % full rank
ans =
3
>> x = A \ b
x =
-2.8889
4.1481
2.4444
6.4.4. Column and Row Factorization¶
A matrix factoring converts a matrix into two or more sub-matrices whose product yields the original matrix. Matrix factorization, or decomposition, is quite common in linear algebra and is used when the submatrices are needed for implementing algorithms. Here, we present a factorization that is not used in any algorithms. Its purpose is solely to provide information and, more importantly, to facilitate learning about systems of equations. It is not part of MATLAB, but the code is listed below. The CR (for column–row) factoring of matrix \(\bf{A}\) produces matrix \(\bf{C}\) that consists of the independent columns of \(\bf{A}\) and another matrix, \(\bf{R}\), showing how combinations of the columns of \(\bf{C}\) are used in \(\bf{A}\) [MOLER20]. The CR factoring was proposed by Dr. Gilbert Strang [1] of the Massachusetts Institute of Technology [STRANG20]. The CR factorization aims to illustrate concepts related to independent and dependent columns and how dependent columns degrade systems of equations.
function [C,R] = cr(A)
% [C,R] = cr(A) is Strang's column-row factorization, A = C*R.
% If A is m-by-n with rank r, then C is m-by-r and R is r-by-n.
[R,j] = rref(A);
r = length(j); % r = rank.
R = R(1:r,:);
C = A(:,j);
end
The cr function uses the rref function to perform Gaussian
elimination as described in Reduced Row Echelon Form. For now, consider the output
of cr rather than its implementation.
The matrix in the following example has independent columns. So in the CR factoring, the \(\bf{C}\) matrix is the same as \(\bf{A}\). The \(\bf{R}\) matrix is an identity matrix, indicating that each column of \(\bf{C}\) is found unchanged in \(\bf{A}\). Matrices with independent rows and columns are said to be full rank.
>> A = randi(10, 3);
A =
3 10 8
6 2 7
10 10 15
>> [C, R] = cr(A)
C =
3 10 10
6 2 5
10 10 9
R =
1 0 0
0 1 0
0 0 1
- Rank
The rank, \(r\), of a matrix is the number of independent rows and columns of the matrix. Rank is never more than the smaller dimension of the matrix.
The CR factoring helps us to see if some rows or columns are linear combinations of other rows or columns. The
crfunction shows one way to compute a matrix’s rank: the number of nonzero pivot variables from the elimination algorithm, which are the diagonal elements of \(\bf{R}\). See Vector Spaces and Rank from the SVD for more information on calculating a matrix’s rank.
Now we change the \(\bf{A}\) matrix, making the third column a linear combination of the first two. The rank of the matrix is then 2. We can see the rank from the CR factorization as the number of columns in \(\bf{C}\) and the number of rows in \(\bf{R}\). The last column of \(\bf{R}\) shows how the first two columns of \(\bf{C}\) combine to make the third column of \(\bf{A}\).
>> A(:,3) = A(:,1) + A(:,2)/2
A =
3 10 8
6 2 7
10 10 15
>> [C, R] = cr(A)
C =
3 10
6 2
10 10
R =
1.0000 0 1.0000
0 1.0000 0.5000
6.4.5. The Row and Column View¶
A system of linear equations may be viewed from the perspective of either its rows or its columns. Plots of row line equations and column vectors give us a geometric understanding of systems of linear equations. The row view shows each row as a line, with the solution being the point where the lines intersect. The column view shows each column as a vector and presents the solution as a linear combination of the column vectors. The column view yields a perspective that will be particularly useful when we consider over-determined systems.
Let’s illustrate the two views with a simple example.
To find the solution, we can either use the left-divide operator or elimination, which is discussed in Elimination.
Row View Plot
We rearrange our equations into line equations.
As shown in figure Fig. 6.18, the point where the lines intersect is the solution to the system of equations. Two parallel lines represent a singular system that does not have a solution.
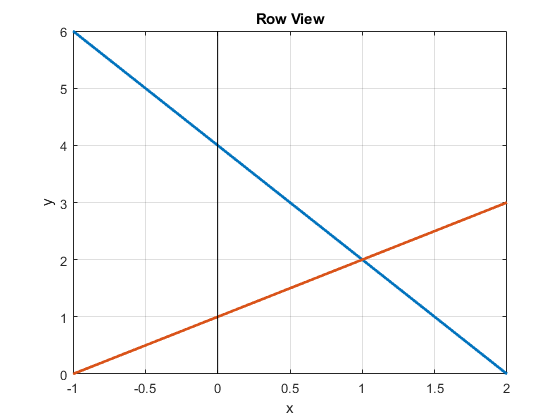
Fig. 6.18 In the row view of a system of equations, the solution is where the line equations intersect.¶
If another row (equation) is added to the system, making it over-determined, an exact solution can still be found if the new row is consistent with the existing rows. For example, we could add the equation \(3x + 2y = 7\) to the system, and the line plot for the new equation will intersect the other lines at the same point, so \(x = 1; y = 2\) is still valid. We could still say that \(\bm{b}\) is in the column space of \(\bf{A}\). Of course, most rows that might be added will not be consistent with the existing rows, so we can only approximate a solution, which we will cover in Over-determined Systems and Vector Projections.
Column View Plot
Let’s view the system of equations as a linear combination of column vectors.
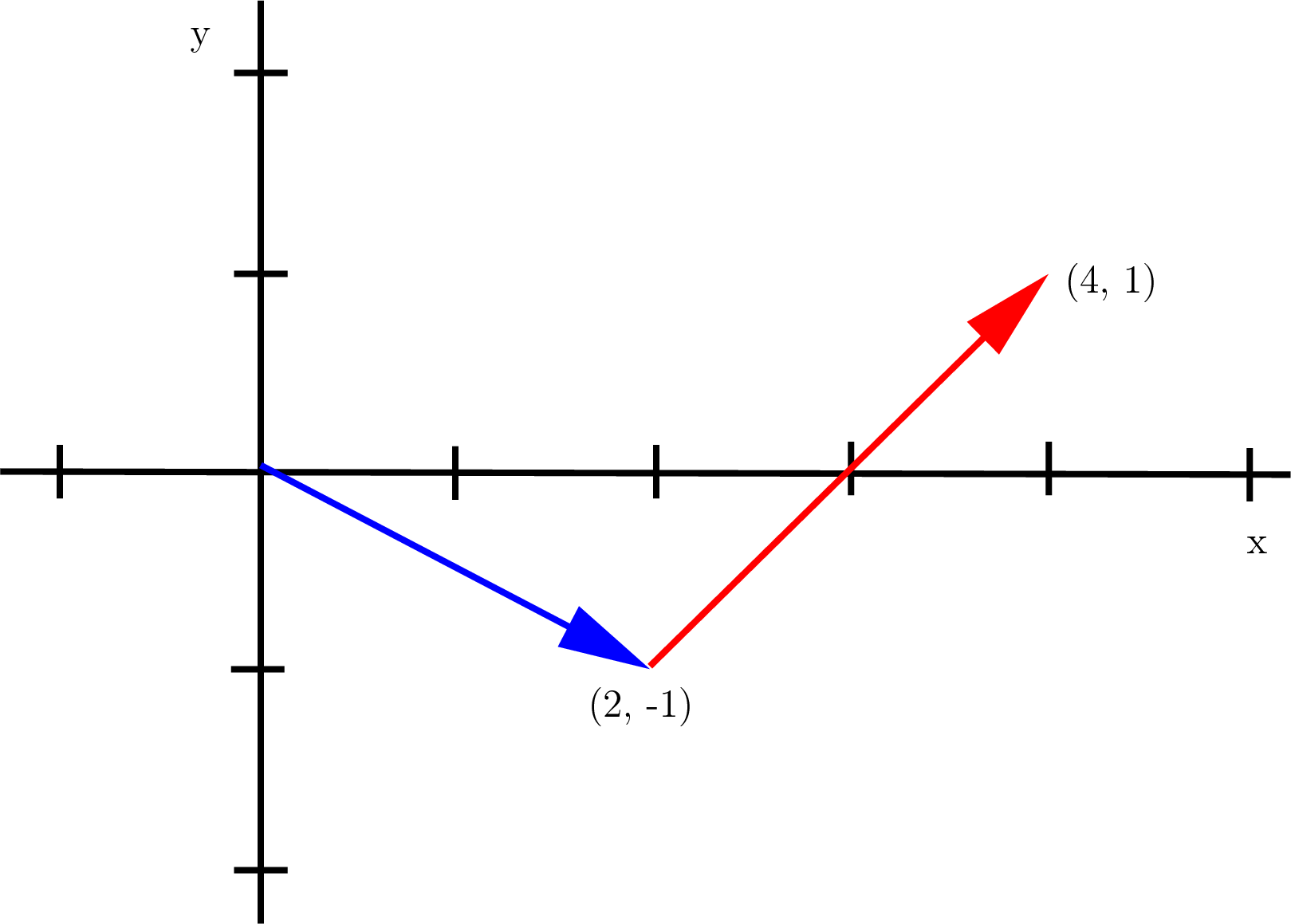
Fig. 6.19 The column view shows a linear combination of the column vectors. Each vector is scaled such that the sum of the vectors is the same as the vector on the right side of the equation.¶
As depicted in figure Fig. 6.19, there is a nonzero linear combination of the column vectors of a full rank matrix that can reach any point in the vector space except the origin. When \(\bf{A}\) is full rank and vector \(\bm{b}\) is nonzero, then \(\bm{b}\) is always in the column space of \(\bf{A}\). The all-zero multipliers provide the only way back to the origin for a full rank system. But a singular system with parallel vectors can have a nonzero vector leading back to the origin, which is called the null solution (Null Space).
Note
Now complete Matrix Homework.
Footnote
