11.5. Numerical Differential Equations¶
An ordinary differential equation (ODE) is an equation of the form
We are given the rate of change, the derivative of \(y(t)\), from which we solve for \(y(t)\). Because we are also given the initial value \(y(t_0) = y_0\), this class of ODE problems is called an initial value problem (IVP). We will consider cases of the function \(y(t)\) representing a single equation and a system of equations.
Differential equations are important to engineers and scientists because they describe changes to the state of dynamic systems. These dynamic systems include moving objects, wires carrying fluctuating electrical current, fluid reservoirs with measurable pressure, temperature, and volume, or anything where the system’s state can be quantified numerically.
Numerical methods are especially needed to solve higher-order and nonlinear ODEs. As is the case with integration, our ability to properly evaluate some ODEs using analytic methods are less than satisfying [STRANG14]. So numerical methods for solving ODEs are important tools in the engineer’s computational toolbox.
This is our third encounter with ODEs. In Throwing a Ball Up, we used MATLAB’s Symbolic Math Toolbox to find the algebraic equations from the differential equations associated with the effect of gravity on a ball thrown upwards. Then, in Systems of Linear ODEs we considered systems of first-order linear ODEs that may be solved analytically with eigenvalues and eigenvectors. Now, we will consider numerical methods to find and plot the solutions to ODEs. We will cover the basic algorithmic concepts of how numerical ODE solvers work and review the efficient suite of ODE solvers provided by MATLAB.
Recall the definition of a derivative:
For discrete samples of \(y\), the derivative becomes
where \(h\) is the distance between sample points, \(h = t_{k+1} - t_k\). Rearranged to find \(y_{k+1}\) from the previous value, \(y_k\), and the slope of the function at \(t_k\), we have
Equation (11.1) is the basis for the simplest ODE solver, Euler’s method. However, we are limited on how small \(h\) can be due to concerns about excessive computation and round-off errors. So the accuracy of equation (11.1) is unacceptable for most applications.
Since differential equations are given in terms of an equation for the derivative of \(y\), \(y' = f(t, y)\), and the initial value, \(y_0\), the general discrete solution comes from the fundamental theorem of calculus, which applies the anti-derivative of a function to a definite integral.
Then the numerical approximation comes from the algorithm used to calculate the definite integral.
At each step, the ODE solver uses a straight line with a slope of \(I_k/h\) to advance from \(y_k\) to \(y_{k+1}\).
11.5.1. Euler’s Method¶
Euler’s method uses a Riemann integral to approximate equation (11.3) with constant height rectangular subintervals. [1] It is a reasonable solution if \(f(t, y)\) is constant or nearly constant. However, the results from Euler’s methods applied to most ODEs are not accurate enough for most applications unless the step size is small enough relative to the rate of change of the \(f(t, y)\) function.
Euler’s method is a perfect match if we let \(f(t, y) = a\), then
The \(y_k\) values may be expressed directly from the initial condition and the rate of change.
First, define a function or function handle for the derivative. It should take two arguments, \(t\) and \(y\). Although in many cases, the function only operates on one variable—usually the second, \(y\), variable. The function should accept and return vector variables.
The eulerODE function implements Euler’s method. The first three
arguments passed to eulerODE are the same as those used with the
MATLAB ODE solvers. The first argument to eulerODE is the derivative
function. Next, specify a tspan argument, which is a row vector of
the initial and final \(t\) values [2]
([t_0 t_final]). The third argument is the initial value
of \(y\), \(y_0 = y(t_0)\). The final argument is \(n\), the
number of values to find. The returned data from the ODE solvers are the
\(t\) evaluation points and the \(y\) solution.
>> f = @(t, y) 5
>> [t, y] = eulerODE(f, [0 10], 5, 4)
t =
0 3.3333 6.6667 10.0000
y =
5.0000 21.6667 38.3333 55.0000
Figure Fig. 11.18 shows a plot comparing the relative accuracy of Euler’s method to other fixed step size algorithms.
function [t, y] = eulerODE(f, tspan, y0, n)
% EULERODE - ODE solver using Euler's method.
%
% f - vectorized derivative function, y' = f(t, y)
% tspan - row vector [t0 tf] for initial and final time
% y0 - initial value of y
% n - number of y values to find
h = (tspan(2) - tspan(1))/(n-1);
t = linspace(tspan(1), tspan(2), n);
y = zeros(1, n); y(1) = y0;
for k = 1:n-1
y(k+1) = y(k) + h*f(t(k), y(k));
end
11.5.2. Heun’s Method¶
Heun’s method uses trapezoid rule integration to approximate equation (11.3).
However, equation (11.4) makes use of \(y_{k+1}\), which is not yet know. So Euler’s method is first used to make an initial estimate (\(\tilde{y}_{k+1}\)). Because the algorithm makes an initial prediction of \(\tilde{y}_{k+1}\) and then updates the estimate with a later equation. Heun’s method belongs to a class of algorithms called predictor–corrector methods.
The complete Heun method equation is given by equation (11.5).
The heunODE function is called with the same arguments as the
eulerODE function.
function [t, y] = heunODE(f, tspan, y0, n)
% HEUNODE - ODE solver using Heun's method.
%
% f - vectorized derivative function, y' = f(t, y)
% tspan - row vector [t0 tf] for initial and final time
% y0 - initial value of y
% n - number of y values to find
h = (tspan(2) - tspan(1))/(n-1);
t = linspace(tspan(1), tspan(2), n);
y = zeros(1, n); y(1) = y0;
for k = 1:n-1
fk = f(t(k), y(k)); yk1 = y(k) + h*fk;
y(k+1) = y(k) + (h/2)*(fk + f(t(k+1), yk1));
end
11.5.3. Runge-Kutta Method¶
The Runge-Kutta method uses Simpson’s rule integration to approximate equation (11.3). Several algorithms are considered to be part of the Runge-Kutta family of algorithms. The so-called classic algorithm used here is an order–4 algorithm with a comparatively simple expression. Runge-Kutta algorithms are the most accurate of the fixed-step size algorithms. They are only surpassed by adaptive step size algorithms, which typically use Runge-Kutta equations.
Runge-Kutta estimates are weighted sums of coefficients calculated from evaluations of \(f(t, y)\) (the derivative function). The equation’s latter coefficients use previous coefficients, so the coefficients at each evaluation point are calculated sequentially before the solution value can be determined.
The rk4ODE function is called with the same arguments as the
eulerODE and heunODE functions.
function [t, y] = rk4ODE(f, tspan, y0, n)
% RK4ODE - ODE solver using the classic Runge-Kutta method.
%
% f - vectorized derivative function, y' = f(t, y)
% tspan - row vector [t0 tf] for initial and final time
% y0 - initial value of y
% n - number of y values to find
h = (tspan(2) - tspan(1))/(n - 1);
t = linspace(tspan(1), tspan(2), n);
y = zeros(1, n); y(1) = y0;
for k = 1:n-1
s1 = f(t(k), y(k));
s2 = f(t(k)+h/2, y(k)+s1*h/2);
s3 = f(t(k)+h/2, y(k)+s2*h/2);
s4 = f(t(k+1), y(k)+s3*h/2);
y(k+1) = y(k) + (h/6)*(s1 + 2*s2 + 2*s3 + s4);
end
11.5.4. Algorithm Comparison¶
We will use the well-known decaying exponential ODE to compare the three methods that use a fixed step size. We will also reference this simple ODE when considering stability constraints on the step size in Stability Constraints.
The ODE
has the solution \(y(t) = c\,e^{-at}\). For our comparison, \(a = 1\), and \(y(0) = 1\).
We can see in figure Fig. 11.18 that, as expected, the classic Runge-Kutta method performs the best, followed by Heun’s and Euler’s methods.
>> % Code for figure 11.18
>> f = @(t, y) -y;
>> [t, y_euler] = eulerODE(f, [0 4], 1, 8);
>> y_exact = exp(-t);
>> [t, y_heun] = heunODE(f, [0 4], 1, 8);
>> [t, y_rk4] = rk4ODE(f, [0 4], 1, 8);

Fig. 11.18 Comparison of fixed interval ODE solvers¶
Note
All algorithms shown in figure Fig. 11.18 perform well if \(h\) is significantly reduced. Notable differences can only be found using a larger step size.
11.5.5. Stability Constraints¶
An unstable algorithm execution gives fluctuating and wrong answers. A user without knowledge of the stability constraints could specify a step size for a fixed step size algorithm that is too large and get an unstable solution. The stability constraint is especially concerning with stiff systems [3] where one term in the solution may place a much higher constraint on the step size than other terms.
We return to the Euler method and an exponentially decaying ODE to find a stability constraint related to \(h\), the distance between consecutive evaluation points [SHEN15]. With \(y' = -a\,y\), where \(a > 0\), \(y(0) = 1\), the exact solution is \(y(t) = e^{-a\,t}\). A property of \(y(t)\) that needs to be preserved is that \(y(t) \to 0\) as \(t \to \infty\).
Referring to Euler’s Method, The forward Euler solution is \(y_{k+1} = y_k - h\,a\,y_k\), or \(y_{k+1} = (1 - ha)\,y_k\). By induction,
A stability constraint on equation (11.6) is needed to ensure that the property of \(y_k \to 0\) as \(k \to \infty\) is preserved.
In the following example \(2/a = 2/0.5 = 4\), but \(h = 5\) and the results are unstable [4].
>> fexp = @(t, y) -0.5*y;
>> [~, y_unstable] = eulerODE(fexp, [0 20], 1, 5)
y_unstable =
1.0000 -1.5000 2.2500 -3.3750 5.0625
The stability constraint for Euler’s method is sufficient for other fixed-step size algorithms.
11.5.6. Implicit Backward Euler Method¶
The implicit backward Euler (IBE) method seeks to remove the stability constraint of fixed step size ODE solvers. To see how the IBE solver works, we will look at equation (11.2) from the perspective of finding \(y_k\) from the yet unknown \(y_{k+1}\). So the terms of equation (11.2) are reordered, and the integration limits are reversed.
Again, we will use the ODE \(y' = -a\,y\), where \(a > 0\), and \(y(0) = 1\). The exact solution is \(y(t) = e^{-a\,t}\). As before, we want to find any required stability constraints to ensure that \(y_k \to 0\) as \(k \to \infty\). We can solve the decaying exponential ODE problem numerically by applying Euler’s method to equation (11.7).
The constraint to ensure stability of equation (11.8) as \(k \to \infty\) requires that
which always holds because both \(h\) and \(a\) are positive numbers. So the implicit backward Euler method is unconditionally stable.
11.5.7. Adaptive Algorithms¶
Numerical ODE solvers need to use appropriate step sizes between evaluation steps to achieve high levels of accuracy while also quickly finding solutions across the evaluation interval. Adaptive ODE solvers reduce the step size, \(h\), where needed to meet the accuracy requirements. They also increase the step size to improve performance when the accuracy requirements can be satisfied with a larger step size.
One of two strategies can be used to determine the step size adjustments. Similar to adaptive numerical methods for computing integrals (Recursive Adaptive Integral), the solution from two half steps could be compared to the solution from a full step. Based on the comparison, the step size can be reduced, left the same, or increased. However, points of an ODE solution are found sequentially, so splitting a wide region into successively smaller intervals would be computationally slow. Instead, the current step size is used to find the next solution (\(y_{k+1}\)) using two algorithms, where one is regarded as more accurate. The guiding principle is that if the solutions computed by the two algorithms are close to the same, the step size is small enough or could even be increased. However, the step size should be reduced if the difference between the solutions is larger than a threshold. If the solutions differ significantly, then the current evaluations are recalculated with a smaller step size. The algorithm advances to the next evaluation step only when the solutions’ differences are less than a specified tolerance.
11.5.7.1. RKF45 Method¶
The Runge-Kutta-Fehlberg method (denoted as RKF45) uses fourth and fifth
order Runge-Kutta ODE solvers to adjust the step size at each evaluation
step. The fourth-order equation used is more complex than the one used
by the fourth-order classic Runge-Kutta algorithm. However, the computed
coefficients for the fourth-order equation are also used for the
fifth-order equation, which only requires one additional coefficient. In
the rkf45ODE function, the fourth-order solution values (RK4) are
stored in the z array, and the fifth-order solution values (RKF45)
are stored in the y array, which is returned from the function. The
coefficients and solution values are calculated using the following
equations. Note that the \(s_2\) coefficient is used to find later
coefficients, but is not part of the fourth or fifth order solution
equations.
There are variances in the literature on the implementation details of
the RKF45 method. The rkf45ODE function is adapted from the
description of the algorithm in the numerical methods text by Mathews
and Fink [MATHEWS05].
Some adaptive ODE algorithms make course changes to the step size, such
as cutting it in half or doubling it. The rkf45ODE function first
finds a scalar value, \(s\), from a tolerance value and the
difference between the solutions from the two algorithms. The
rkf45ODE function finds the new step size by multiplying the current
step size by the scalar. The scalar will be one if the difference
between the solutions is half of the tolerance. The algorithm advances
to the next step if the difference between the two solutions is less
than the tolerance value, which occurs when the scalar is greater than
0.84. Otherwise, the current evaluation is recalculated with a smaller
step size. The multiplier is restricted to be no more than two. So, the
step size will never increase more than twice its current size. The
tolerance and the threshold for advancing to the next step are tunable
parameters.
The initial value (\(y_0\)) passed to the rkf45ODE function can
be either a scalar for a single equation ODE or a column vector for a
system of ODEs. Since the number of steps to be taken is not known in
advance, the initial step size is a function argument.
In the example plotted in Figure Fig. 11.19, the adaptive Runge-Kutta-Fehlberg (RKF45) method is more accurate than the classic Runge-Kutta method (RK4), with the initial step size of RKF45 being the same as the fixed step size used by RK4. For most ODEs, the ability of RKF45 to reduce the step size where needed likely contributes more to its improved accuracy than can be attributed to using a higher order equation.
>> % Code for figure 11.19
>> f = @(t,y) -y;
>> [t, y_rkf45] = rkf45ODE(f, [0 4], 1, 0.5);
>> y_exact = exp(-t);
>> hold on
>> plot(t, y_exact), plot(t, y_rkf45, ':')
>> [t, y_rk4] = rk4ODE(f, [0 4], 1, 8);
>> plot(t, y_rk4, '--')
>> hold off
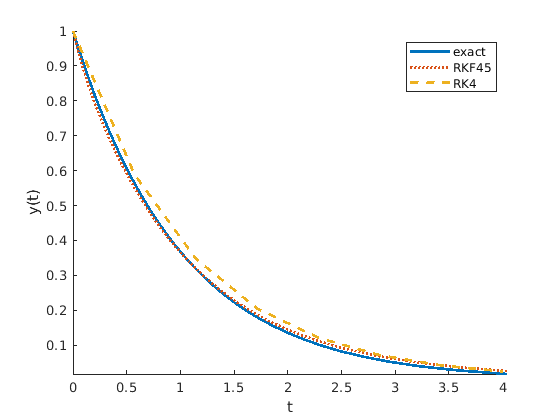
Fig. 11.19 The adjustable step size of the RKF45 algorithm gives accurate results with good performance.¶
11.5.7.2. MATLAB’s ode45¶
Although the adaptive rkf45ODE function has good results, it is not
as accurate as MATLAB’s ode45 function. Using the same comparison
test shown in figure Fig. 11.19, the ode45
function had a maximum error of \(6{\times}10^{-6}\), and a plot of
its solution appears to be directly on top of the exact solution plot.
MATLAB’s ode45 is the ODE solver that should be tried first for most
problems. It has good accuracy and performance for ODEs that are not
stiff. [5] Like the RKF45 method, it uses an adaptive step size
algorithm based on the fourth and fifth order Runge-Kutta formula.
The ode45 function is called with the same arguments as the ODE
solvers previously described, except neither the initial step size nor
the number of evaluation points is given. The MATLAB ODE solvers also
offer additional flexibility regarding the evaluation points. If the
tspan argument contains more than two values, then tspan is
taken to be a vector listing the evaluation points to use.
As before, we often save two return values from ode45,
[t, y]= ode45(f, tspan, y0). The return values are
stored in column vectors rather than row vectors, as with the previously
used simple functions. If no return values are specified, ode45 will
make a plot of the \(y\) values against the \(t\) axis.
The MATLAB ODE solvers have several additional options and tunable
parameters. Rather than passing those individually to the solver, a data
structure holding the options is passed as an optional argument. The
data structure is created and modified using the odeset command with
name–value pairs. Refer to the MATLAB documentation for odeset for a
full list of the options and their descriptions.
>> options = odeset('RelTol', 1e-5); % create
>> options = odeset(options, 'AbsTol',1e-7); % modify
>> [t, y] = ode45(f, tspan, y0, options); % use
11.5.8. The Logistic Equation¶
Let’s look at an example problem that models population growth slowed by competition, which occurs when the population has limited resources. The growth is proportional to the population size, \(y\). The competition (\(y\) against \(y\)) adds a \(-y^2\) term.
The solution is modeled with positive and negative values for \(t\). Strang’s text on differential equations ([STRANG14], p. 55) gives the analytic solution as:
where, \(d = \frac{a}{y(0)} - b\).
The population size is modeled as zero in the distant past (\(t = -\infty\)). The steady state (\(t = \infty\)) population size is \(K = \frac{a}{b}\), which is the sustainable population size.
The halfway point can be modeled as \(y(0) = a/2b\).
The logistic_diffEq script computes the positive half of the
solution and then reflects the values to get the negative time values.
The solution plot is shown in figure Fig. 11.20.
% File: logistic_diffEq.m
% Logistic Equation: a = 1, b = 1
f = @(t, y) y - y.^2;
tspan = [0 5]; y0 = 1/2;
[t, y] = ode45(f, tspan, y0);
figure, plot(t,y)
t1 = flip(-t); y1 = flip(1-y); t2 = [t1;t];
y2 = [y1;y]; analytic = 1./(1 + exp(-t2));
figure, hold on
plot(t2, y2, 'o'), plot(t2, analytic)
hold off, title('Logistic Equation')
xlabel('t'), ylabel('y')
legend('ode45 Numeric Solution', 'Analytic Solution', ...
'Location', 'northwest');
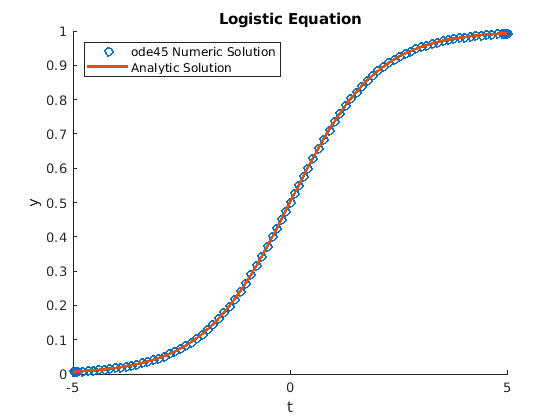
Fig. 11.20 Numerical and analytical solution to the logistic ODE¶
11.5.9. Stiff ODEs¶
A problem is stiff if the solution contains multiple terms with different step size requirements. A slower-moving component may dominate the solution; however, a less significant component may change much faster. Adaptive step size algorithms must take small steps to maintain accurate results. Because stiff ODEs have solutions with multiple terms, they come from either second-order or higher-order ODEs or systems of ODEs.
We will now look at an example of a moderately stiff system of ODE
equations. Then we will see how implicit solvers solve stiff systems of
ODEs and are unconditionally stable. Then we will look at MATLAB’s stiff
ODE solver, ode15s.
11.5.9.1. Stiff ODE Systems¶
Here we show a system of ODEs that has a moderately stiff solution. See Systems of Linear ODEs for a review of systems of first-order, linear ODEs.
It is more convenient to express systems of ODEs using vectors and matrices.
The eigenvectors, eigenvalues, and \(c\) coefficients are found with some help from MATLAB.
The solution to the system of ODEs then comes from the general solution for systems of first order, linear ODEs as given by equation (8.10) in Systems of Linear ODEs.
The system given by equation (11.10) is stiff because the exact
solution has terms with significantly different exponent values coming
from the eigenvalues of \(\bf{A}\). The stability constraints on the
\(e^{-49\,t}\) terms require \(h < 2/49 \approx 0.0408\). From
the beginning of the evaluation, those terms will move toward zero much
faster than the \(e^{-t}\) terms. We can see from figure
Fig. 11.21 and figure Fig. 11.22 that an
adaptive algorithm such as RKF45 or MATLAB’s ode45 will
significantly reduce the step size from the beginning of the evaluations
until the \(e^{-49\,t}\) term has sufficiently gone to zero. The
errors between the adaptive solution and the exact solution eventually
go to near zero, and the step sizes get larger.
>> % Code for figures 11.21 and 11.22
>> A = [-25 24; 24 -25]; u0 = [1;2];
>> fA = @(t, u) A*u;
>> [t, u] = rkf45ODE(fA, [0 1], u0, 0.04);
>> x = @(t) -0.5*exp(-49*t) + 1.5*exp(-t);
>> y = @(t) 0.5*exp(-49*t) + 1.5*exp(-t);
>> figure, hold on
>> plot(t, u(1,:), 'o'), plot(t, u(2,:), '+')
>> plot(t, x(t), ':'), plot(t, y(t), '--')
>> hold off
>> U = [x(t); y(t)];
>> figure, hold on
>> plot(t, vecnorm(U - u))
>> plot(t(1:end-1), diff(t), 'o:')
>> hold off
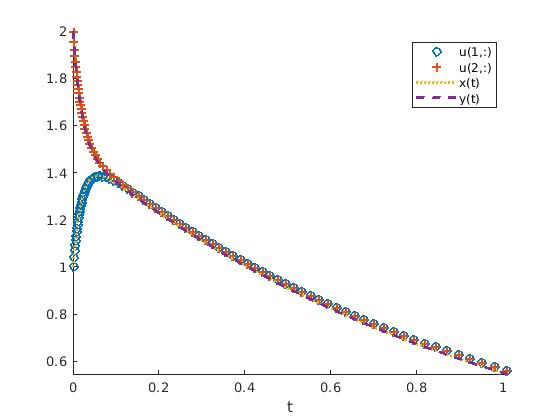
Fig. 11.21 Stiff ODE system—the \(\pm 0.5\,e^{-49\,t}\) terms quickly go to zero and the \(x(t)\) and \(y(t)\) solutions approximately merge to \(1.5\,e^{-t}\).¶

Fig. 11.22 Error and step size for stiff ODE system. First curve—the norm of the error vector between the exact solution and that found from the RKF45 solver. Second curve—the step size, \(h\), for the stiff ODE system.¶
11.5.9.2. Implicit Solvers for Systems of ODEs¶
The implicit backward Euler (IBE) method is used here to solve stiff systems of ODEs. The initial discussion parallels that of Implicit Backward Euler Method, but the equations are extended to systems of ODEs. As with the implicit solver for a single ODE equation, the IBE method for systems of ODEs is also unconditionally stable.
We will again use the decaying exponential ODE from the previous section. The \(\bf{A}\) matrix is required to have real, negative eigenvalues.
The solution is \(\bm{u}(t) = \bm{u}_0 e^{\mathbf{A}\,t}\). Refer to Systems of Linear ODEs and A Matrix Exponent and Systems of ODEs for more information about how we get from a solution with a matrix in the exponent to equation (11.9).
Notice that we do not have a negative sign in front of the \(\bf{A}\) matrix as we previously saw with \(a\) in the scalar ODE from Stability Constraints. But a decaying exponential goes to zero when \(t\) goes to infinity because the eigenvalues of \(\bf{A}\) are negative.
We get the starting equation for the numerical solution by applying equation (11.7).
Equation (11.11) is an implicit equation for solving
systems of ODEs numerically, and is implemented in the IBEsysODE
function. Notice that the implicit approach requires solving an equation
at every step. In this case, the equation is a linear system of
equations with a fixed matrix. Hence, the IBEsysODE function uses LU
decomposition once and calls on MATLAB’s triangular solver via the
left-divide operator to quickly find a solution in each loop iteration.
If this were a nonlinear problem, then numerical methods such as
Newton’s method or the secant method described in Numerical Roots of a Function would
be needed, which could add significant computation. For this reason,
implicit methods are not recommended for problems that are either not
stiff or nonlinear [SHEN15].
function [t, u] = IBEsysODE(A, tspan, u0, n)
% IBESYSODE - ODE solver using the Implicit Euler Backward
% method for systems of ODEs.
%
% A - matrix defining the system coefficients
% tspan - row vector [t0 tf] for initial and final time
% y0 - initial value of y
% n - number of y values to find
h = (tspan(2) - tspan(1))/n;
t = linspace(tspan(1), tspan(2), n);
m = size(A, 1); u = zeros(m, n); u(:,1) = u0;
[L, U, P] = lu(eye(m) - h*A);
for k = 1:n-1
u(:,k+1) = U\(L\(P*u(:,k)));
end
Figure Fig. 11.23 shows the numerical solution that the
IBEsysODE function found for our stiff system of ODEs. Since this is
a fixed step size solution, the step size was decreased to 0.02 to track
the quickly changing \(e^{-49\,t}\) terms in the solution. Of
course, the small step size is not needed once the \(e^{-49\,t}\)
term is sufficiently close to zero. Remember that there is a difference
between accuracy and stability. A lack of stability causes the solution
to be wrong as \(k \to \infty\). A lack of accuracy means that the
exact solution is not well modeled by the numerical solution, which is
often solved by reducing the step size.
>> A = [-25 24; 24 -25];
>> u0 = [1;2];
>> [t, u] = IBEsysODE(A, [0, 1], u0, 50);
>> x=@(t)-0.5*exp(-49*t) + 1.5*exp(-t);
>> y=@(t)0.5*exp(-49*t) + 1.5*exp(-t);
>> figure, hold on
>> plot(t, u(1,:), 'o')
>> plot(t, u(2,:), '+')
>> plot(t, x(t), ':')
>> plot(t, y(t), '--')
>> hold off
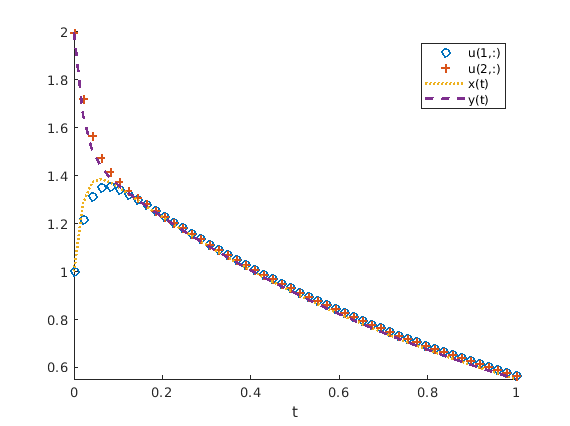
Fig. 11.23 With enough data points, the IBEsysODE function is able to to reasonably
well track the rapidly changing solution of the \(e^{-49\,t}\) terms.¶
To evaluate the stability of the IBE method, we start by using induction to express the steady state solution in terms of the initial value.
The stability constraint is that \(\bm{u}_k \to 0\) as \(k \to \infty\). So we need that
Since our \(\bf{A}\) matrix is symmetric, we can use the property of \(\norm{\cdot}_2\) matrix norms that \(\norm{\mathbf{A}}_2 = \max_i \abs{\lambda_i(\mathbf{A})}\), where \(\lambda_i(\mathbf{A})\) means the \(i\)th eigenvalue of \(\bf{A}\) (Matrix Norms).
Now we can make use of the eigenvalue property for symmetric matrices that \(\lambda_i(\mathbf{A}^{-1}) = \frac{1}{\lambda_i(\mathbf{A})}\) (equation (8.4) in Properties of Eigenvalues and Eigenvectors).
Equation (11.12) holds for any symmetric \(\bf{A}\) matrix with negative eigenvalues. So the implicit backward Euler method is unconditionally stable for systems of ODEs.
Unconditionally stable ODE solving algorithms remove the concern about having an unstable numerical solution because the step size is too large, but as we saw in figure Fig. 11.23, accuracy requirements may still require a reduced step size. The more complex and robust algorithms of MATLAB’s ODE solvers for stiff systems can adjust the step size enough to find accurate solutions without being excessively slowed by a stiff system.
11.5.9.3. MATLAB’s ode15s¶
MATLAB has several stiff ODE solvers. The ode15s function should be
tried first for stiff ODEs. The primary authors of MATLAB’s suite of ODE
solvers, Shampine and Reichelt, describe ode15s as an implicit
quasi-constant step size algorithm. They further give the following
suggestion regarding picking which ODE solver to
use [SHAMPINE97].
\(\ldots\) Except in special circumstances,
ode45should be the code tried first. If there is reason to believe the problem to be stiff, or if the problem is unexpectedly difficult forode45, theode15scode should be tried.
Figure Fig. 11.24 shows how ode15s handles the stiff
system of ODEs used in the previous examples.
>> % Code for figure 11.24
>> A = [-25 24; 24 -25]; u0 = [1;2];
>> fA = @(t, u) A*u;
>> [t, y_ode15s] = ode15s(fA, [0 1], u0);
>> t = t'; u = y_ode15s';
>> x = @(t) -0.5*exp(-49*t) + 1.5*exp(-t);
>> y = @(t) 0.5*exp(-49*t) + 1.5*exp(-t);
>> figure, hold on
>> plot(t, u(1,:)', 'o'), plot(t, u(2,:)', '+')
>> plot(t, x(t), ':'), plot(t, y(t), '--')
>> hold off

Fig. 11.24 The ode15s ODE solver is designed for stiff systems, so the less
significant, but rapidly changing terms do not significantly reduce the step
size.¶
11.5.10. MATLAB’s Suite of ODE Solvers¶
MATLAB’s ode45 and ode15s are the recommended nonstiff and stiff
ODE solvers for most problems. If those do not give satisfactory
results, then ode23 and ode113 might be tried for nonstiff
problems. For stiff problems, ode23s should be the next function
tried after ode15s. Additional documentation and research may be
needed to select the best solver for some problems. The MathWorks’ web
pages have quite a bit of documentation on the suite of ODE solvers. The
MATLAB Guide by Higham and Higham [HIGHAM17] have
extended coverage of MATLAB’s ODE solvers. The MATLAB ODE solvers
lists MATLAB’s suite of ODE solvers.
Solver |
Problem type |
Description |
|---|---|---|
|
Nonstiff |
Explicit Runge-Kutta, orders 4 and 5 |
|
Nonstiff |
Explicit Runge-Kutta, orders 2 and 3 |
|
Nonstiff |
Explicit linear multistep, orders 1–13 |
|
Stiff |
Implicit linear multistep, orders 1–5 |
|
Fully implicit |
Implicit linear multistep, orders 1–5 |
|
Stiff |
Modified Rosenbrock pair, orders 2 and 3 |
|
Mildly stiff |
Implicit trapezoid rule, orders 2 and 3 |
|
Stiff |
Implicit Runge-Kutta, orders 2 and 3 |
function [t, y] = rkf45ODE(f, tspan, y0, h0)
% rk5ODE - Adaptive interval ODE solver using the
% Runge-Kutta-Fehlberg method.
%
% f - vectorized derivative function, y' = f(t, y)
% tspan - row vector [t0 tf] for initial and final time
% y0 - initial value of y, scalar or column vector
% h0 - initial step size
tol = 2e-5;
h = h0;
nEst = ceil((tspan(2) - tspan(1))/h);
m = size(y0, 1);
t = zeros(1, 2*nEst); % estimated preallocation
y = zeros(m, 2*nEst);
z = zeros(m, 2*nEst);
t(1) = tspan(1);
y(:,1) = y0; % RKF45 results
z(:,1) = y0; % RK4 results
k = 1;
while t(k) < tspan(2)
s1 = h*f(t(k), y(:,k));
s2 = h*f(t(k) + h/4, y(:,k) + s1/4);
s3 = h*f(t(k) + h*3/8, y(:,k) + s1*3/32 + s2*9/32);
s4 = h*f(t(k) + h*12/13, y(:,k) + s1*1932/2197 ...
- s2*7200/2197 + s3*7296/2197);
s5 = h*f(t(k) + h, y(:,k) + s1*439/216 - s2*8 ...
+ s3*3680/513 - s4*845/4104);
s6 = h*f(t(k) + h/2, y(:,k) - s1*8/27 + s2*2 ...
- s3*3544/2565 + s4*1859/4104 - s5*11/40);
z(:,k+1) = y(:,k) + s1*25/216 + s3*1408/2565 ...
+ s4*2197/4101 - s5/5; % RK4
y(:,k+1) = y(:,k) + s1*16/135 + s3*6656/12825 ...
+ s4*28561/56430 - s5*9/50 + s6*2/55; % RKF5
% no divide by 0, h at most doubles
algDiff = max(tol/32, norm(z(:,k+1) - y(:,k+1)));
s = (tol/(2*algDiff))^0.25;
h = h*s;
if s > 0.84
t(k+1) = t(k) + h;
k = k + 1;
end
end
% delete unused preallocated memory
t(k+1:end) = []; y(:,k+1:end) = [];
Footnotes:
