5.5.3. Transitions Between Behaviors¶
We have seen how to implement different Algorithmic Behaviors, but determining when to transition to different behaviors (states of the algorithm FSM) can actually be one of the more difficult tasks. It requires detailed testing and careful observation and analysis of the results. This is one reason why it might help to record and share videos of robot experiments.
We need to determine a FSM diagram to follow and determine the appropriate conditions and threshold values to invoke a transition to a new state. Here is one possible FSM diagram. Testing and experimentation will determine if the FSM will work or if it needs to be changed. Testing will also determine the desired transition conditions.
From initial testing, the following threshold values for transitions between states are used. These values are, of course, only for the exact implementation we are using and could even change for us if more testing shows a need for change.
Name |
Control |
Value |
|---|---|---|
|
|
0.78 |
|
|
1.5 |



5.5.3.1. Hybrid FSM¶
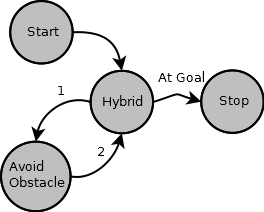
Fig. 5.6 Finite State Machine Diagram for the Hybrid Avoid Obstacles and Go-to-Goal Algorithm¶
The conditions for the labeled transitions are as follows.
5.5.3.2. Cul-de-sac FSM¶
To solve The Cul-de-sac Problem, we need to add the Wall Following behavior to the Hybrid FSM.
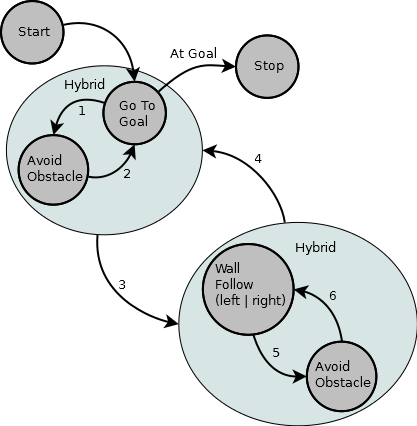
Fig. 5.7 Finite State Machine Diagram for The Cul-de-sac Problem¶
The conditions for the labeled transitions are as follows.
Note
Avoid Obstacle is integrated with both the Go-To-Goal and Wall Follow behavior using a weighted hybrid algorithm.
In both the Go-To-Goal state and Wall Follow state, track the minimum distance to the goal. Lack of progress or making progress towards the goal is part of the state transition criteria.
Three conditions must be satisfied to move from the Wall Following State to the Go-To-Goal state.
In the Hybrid Go-To-Goal State, track  , which is needed to
test for transition number 3.
, which is needed to
test for transition number 3.
In the Hybrid Wall Follow State, track , which is needed to
test for transition number 4.


 – lack of progress towards goal
– lack of progress towards goal- – clear of obstacles,
 , – clear path to goal,
, – clear path to goal,and
 – progress towards goal
– progress towards goal 

