5.5.1.2. Avoid Obstacles¶
Here, we give up on the objective of going towards a goal and simply move in a direction away from obstacles. We switch to this mode when the robot would run into an obstacle otherwise. We will also use data from the obstacle avoidance algorithms to veer away and around from obstacles.
5.5.1.2.1. Summing the Obstacle Detection Vectors¶
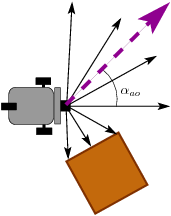
A common way to identify a robot heading to avoid obstacles is to configure the
robot with distance sensors around the robot. Using the distance to obstacle
measurements as vectors, the sum of the vectors is calculated to yield the
avoid obstacle heading, ( ). Due to the symmetry of the
measurement angles when no obstacles are detected, shorter vectors in the
direction of obstacles cause the sum of vectors to deflect away from obstacles.
). Due to the symmetry of the
measurement angles when no obstacles are detected, shorter vectors in the
direction of obstacles cause the sum of vectors to deflect away from obstacles.
The simple sum of vectors is a good start, but the resulting heading will likely not be adequate enough.
It will detect objects to the side that pose no collision threat. A solution is to limit the lengths of the distance measurements so that forward measurements have greater range than side measurements.
The sum of the vectors will always point forward and likely not adequately deflect away from obstacles. A solution is to shift each vector in the opposite direction. Thus, detected obstacles can result in negative vectors. A panic element to the shift was also adopted to give larger negative vectors in the event of a near collision.
The absolute value of  is an
indicator of the need to switch to this behavior. We switch to this behavior
when
is an
indicator of the need to switch to this behavior. We switch to this behavior
when  . We can return
to other behaviors when
. We can return
to other behaviors when  falls bellow a
threshold,
falls bellow a
threshold,  .
.
In a panic situation where the robot needs to back out of a tight spot before
proceeding, it is desired for the robot to go in reverse at a slight angle.
One shortcoming of the Summing the Obstacle Detection Vectors algorithm is dealing with head on
obstacles. If an obstacle, such as a wall, is directly in front of the robot,
then the lack of object detection from the sides can cause our
to stay near zero until the robot is near the obstacle and
then switch to a value close to  . In fact, it is possible
that the robot will oscillate between the two and just move back and forth in
front of the obstacle. Thus, it is desired to limit so that
the robot backs up at an angle to begin turning away from the obstacle.
. In fact, it is possible
that the robot will oscillate between the two and just move back and forth in
front of the obstacle. Thus, it is desired to limit so that
the robot backs up at an angle to begin turning away from the obstacle.
