8.1. Introduction to Eigenvalues and Eigenvectors¶
Matrix multiplication involves a lot of stretching and rotation for a
vector. When we multiply a matrix and a vector together
(\(\mathbf{A}\,\bm{x}\)), the result is usually a stretching and a
rotation of the original vector \(\bm{x}\). However, that is not
always the case. There are special matrices that rotate a vector, but do
not change its length. See Rotation of a Point for more on rotation
matrices. There are also vectors corresponding to square matrices that
are stretched by the multiplication, but not rotated. This latter case
is what we consider here.
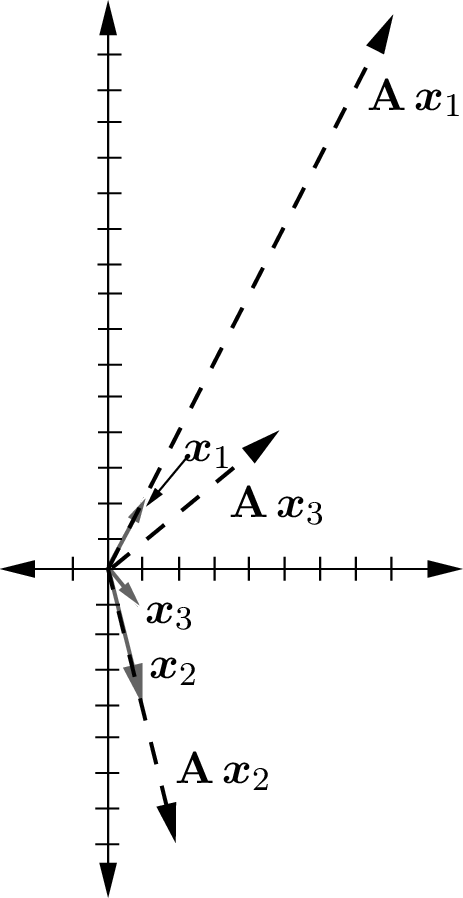
Fig. 8.1 shows the three vectors and the product of each
vector with the \(\bf{A}\) matrix. The product
\(\mathbf{A}\,\bm{x}_3\) shows the typical matrix-to-vector
multiplication result. The multiplication both stretches and rotates the
vector. But in the cases of \(\mathbf{A}\,\bm{x}_1\) and
\(\mathbf{A}\,\bm{x}_2\), the vectors are stretched, but not
rotated. This is because vectors \(\bm{x}_1\) and \(\bm{x}_2\)
are eigenvectors of matrix \(\bf{A}\). The eigenvalues tell us the
stretching (scaling) factor for each eigenvector.
Fig. 8.1 Eigenvectors are only scaled by matrix multiplication. Other vectors are
both scaled and rotated by multiplication.¶
When a vector \(\bm{x}_i\) is one of the eigenvectors of a matrix
\(\bf{A}\), the following special relationship holds.
The power of this relationship is that when, and only when, we multiply
a matrix by one of its eigenvectors, then, in a simplified equation, we
can replace the matrix with a scalar.
For the \(n{\times}n\) square matrix, there are \(n\)eigenvectors, \(\bm{x_i}\), and \(n\) corresponding scalar
eigenvalues, \(\lambda_i\). Each coupled eigenvalue and
eigenvector pair is called an eigenpair.